Регулировка петли: Регулировка мебельных петель | Как отрегулировать петли шкафа Петли Статьи о мебельной фурнитуре
Как отрегулировать петли? — полезная статья
Многие из нас обращали внимание на то, что во время длительной эксплуатации корпусной мебели их двери, прикрепленные к основанию при помощи петель, начинают задевать верхнюю и нижнюю панели, а также друг друга (дверки становятся перекошенными).
Чтобы предотвратить это, потребуется отрегулировать дверные петли, отвечающие за наклон дверного полотна, а также плотность прилегания дверей к основанию шкафа. Отрегулировать петли не сложно и, имея необходимые инструменты, можно сделать это своими руками, не прибегая к помощи мастера.
Регулировка дверных петель
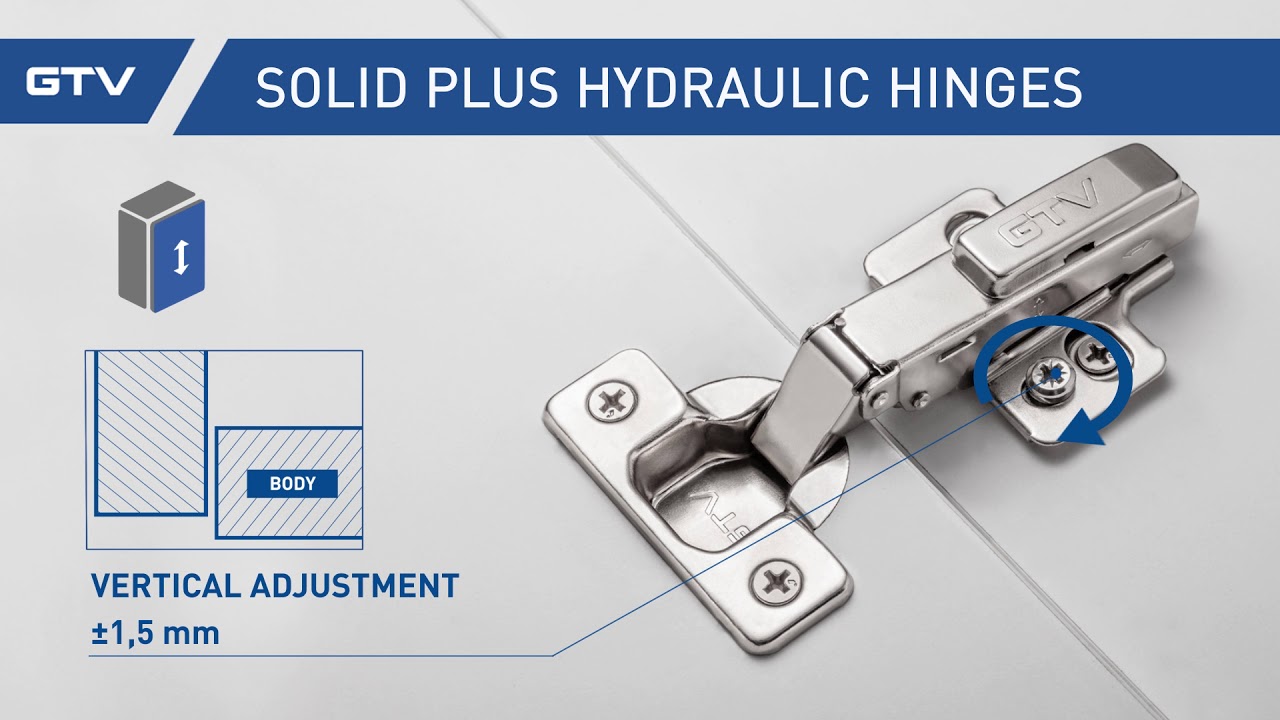
В последние годы пользуются популярностью дверные навесы скрытого типа, поскольку они придают конструкции эстетический внешний вид. Но, к сожалению, на практике такие петли доставляют не мало проблем.
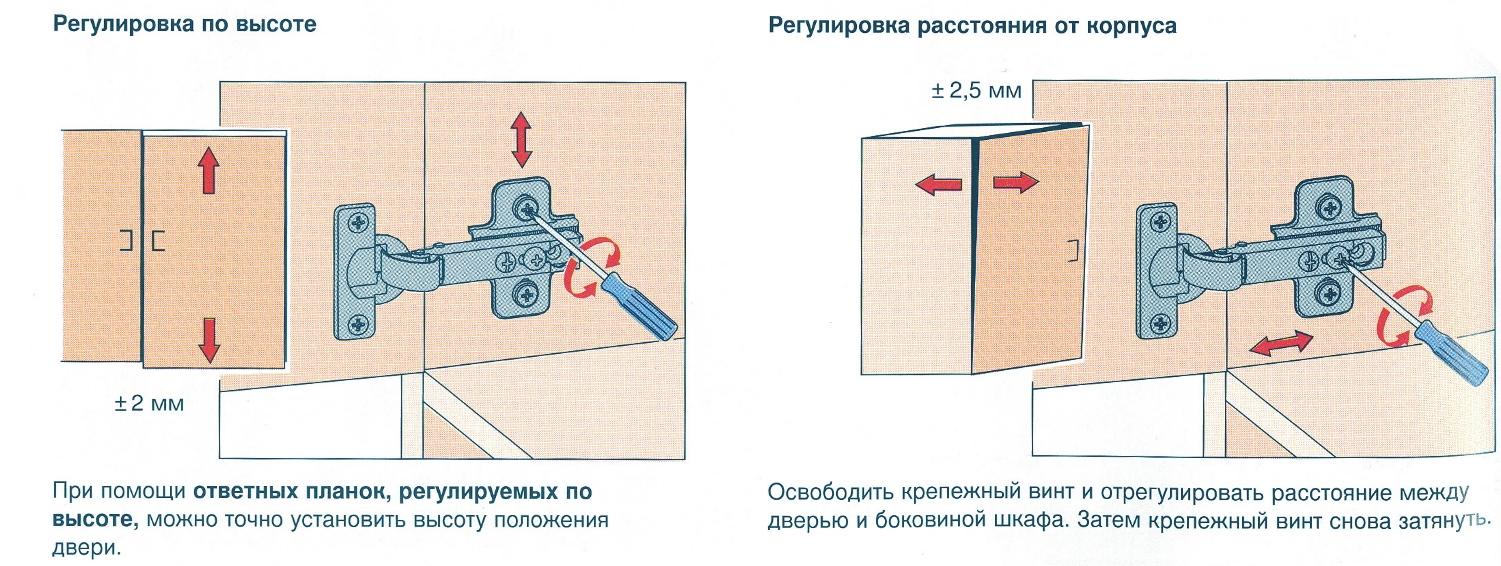
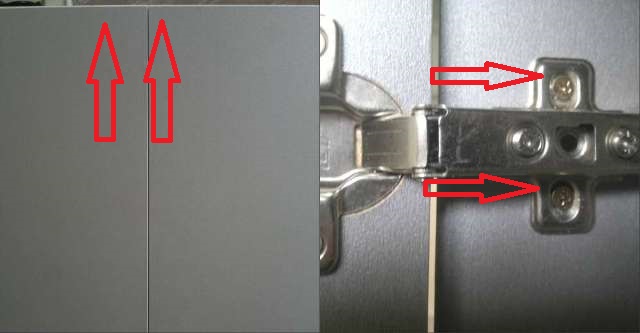
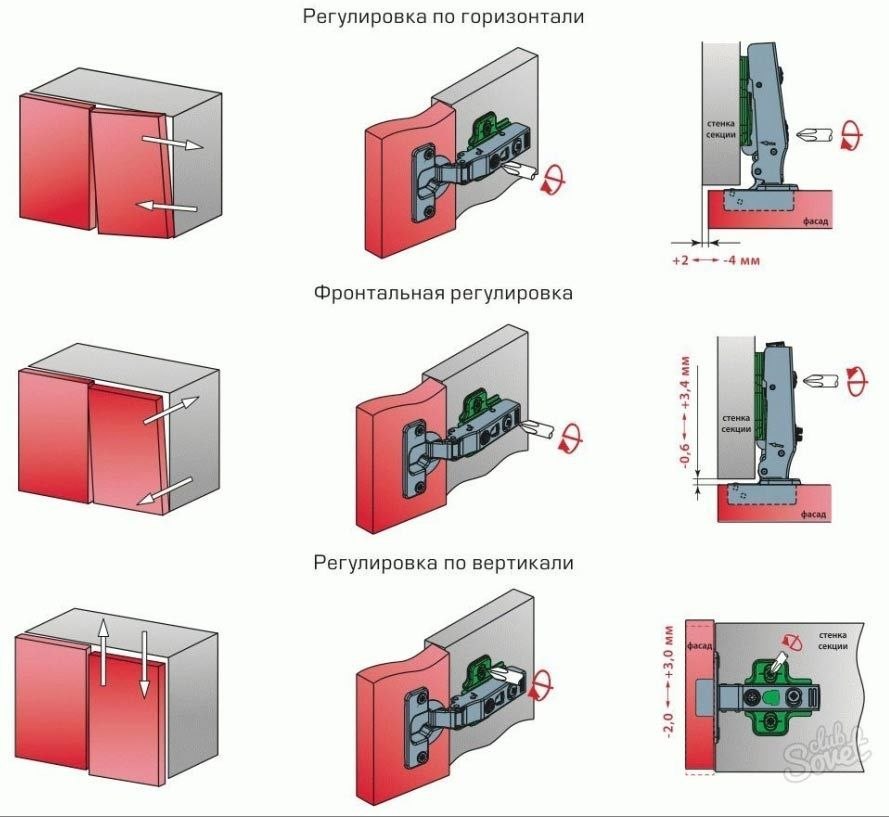
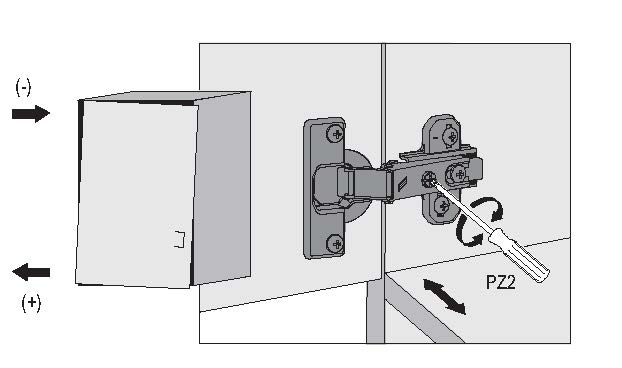
Чтобы отрегулировать дверные петли, необходимо ослабить винты и, используя отвертку, немного сместить часть петли, чтобы образовался необходимый зазор, а затем зафиксировать петлю (только одним винтом). Закройте дверь до упора, если она нормально закрывается и не перекошена, то можно зафиксировать и остальные винты. Если проблема не ушла или дверь стала тереться с другой стороны, необходимо повторить процедуру с противоположной стороны. Отрегулировав петли, обязательно затяните ослабленные винты.
Закройте дверь до упора, если она нормально закрывается и не перекошена, то можно зафиксировать и остальные винты. Если проблема не ушла или дверь стала тереться с другой стороны, необходимо повторить процедуру с противоположной стороны. Отрегулировав петли, обязательно затяните ослабленные винты.
При закрывании и открывании дверей петли могут издавать скрип (из-за пыли и песка, попавших в них в ходе ремонта). Чтобы устранить проблему, необходимо удалить грязь и смазать штифт, держащий навес, маслом.
Регулирование петель шкафа
Если у шкафа двери начали провисать, необходимо подтянуть петли. При сильном износе петель эта процедура не даст ожидаемого эффекта, придется петли полностью заменить.
Первоначально рекомендовано проверить, затянуты ли 4 винта крепежей должным образом. Винты могли расшататься. Чтобы дверь закрывалась плотнее, необходимо на задней части петли ослабить крепежный винт, выдвинуть немного дверку вперед, а затем винт затянуть снова.
При перекосе двери крепежный винт необходимо подтянуть до тех пор, пока дверца не достигнет нужного положения.
Старые дверцы перекашиваются, в основном, от того, что обвязки дверей сильно ослабли, а передняя часть двери начинает провисать. Исправить ситуацию поможет дверной выравниватель. После того, как дверка выровнена, при помощи угловых стяжек она укрепляется.
Как продлить срок службы петель
Чтобы увеличить срок эксплуатации межкомнатных дверей и дверок шкафов, рекомендовано хотя бы раз в несколько лет осуществлять профилактические меры.
- Петли необходимо регулярно смазывать машинным маслом, а также уделять особое внимание внешнему виду петлей (при их износе придется поменять на новые).
- Кроме того, раз в несколько лет рекомендовано подтягивать дверные петли и прочую фурнитуру, поскольку эти рабочие элементы быстро расшатываются.
- Еще одна профилактическая мера – очищение ригелей от грязи и пыли.

Если соблюдать несложные правила, описанные выше, можно увеличить в несколько раз срок эксплуатации дверей, а также предотвратить возникновение серьезных неисправностей.
Петли Koblenz выбор, регулировка, рекомендации и эксплуатация
Для правильной установки дверных петель фирмы Krona Koblenz необходимо знать:
|
|
Нагрузки на петли KRONA KOBLENZ зависят от:
|
Причины, увеличивающие нагрузки на петли:
|
| Изменяя межосевое расстояние между скрытых петель можно изменить горизонтальную нагрузку на петли.  |
Например: 2 петли Koblenz K2400 (40 кг — вес двери)
|
| Таблица выбора межосевого расстояния |
Две скрытых петли.
Рекомендуется использовать при установке стандартной двери.
Три скрытых петли
|

Дополнительная петля препятствует искривлению дверного полотна
Четыре петли. |
|
Три петли устанавливаются при применении доводчика на двери.
Устанавливается дополнительная петля на расстоянии 250 мм ниже верхней.
Установка трёх петель рекомендуется при ширине двери более 900 мм.
Доводчик необходимо отрегулировать на минимальное усилие, достаточное
для его работы, в противном случае работа петель может быть нарушена.
Четыре петли. |
|
| Ограничитель открывания двери устанавливается на расстоянии не менее 75% ширины дверного полотна по направлению к замку |
Четыре петли. |
Рекомендуется устанавливать при использовании:
|
Выбор скрытых петель зависит от места применения.
|
Выбор петель: ВЕС ДВЕРИ
| Вес двери состоит из веса дверного полотна, веса установленной дверной фурнитуры и возможные элементы декора. В случае, когда в дверь ассимметрично установлено стекло ближе к ручке двери, нагрузка на петли увеличивается. В этом случае необходимо добавление третьей (или четвертой) петли вверху двери. |
Выбор петель: НЕ ВСЁ РЕШАЮТ ПЕТЛИ
|
 У смонтированной коробки необходимо
У смонтированной коробки необходимоВНИМАНИЕ |
Декларация соответствия |
| Документ, в котором KRONA KOBLENZ заявляет, что скрытая петля соответствует положенным стандартам и техническим нормам. Krona Koblenz предоставлят декларацию о соответствии для всех своих петель |
Сертификация CE |
Продукт соответствует основным требованиям безопасности:
|
 д.
д.Сертификат на огнестойкость |
| Данные петли можно использовать для противопожарых дверей (REI). Петли сохраняют работоспособность в течение 30/60 минут в случае пожара. В инструкциях по установке есть специальный символ для сертифицированных петель Krona Koblenz. Сертификат огнестойкости Скрытые петли Kubica K6300 Сертификат огнестойкости петли Kubica K6200, Kubica K6700 |
Эксплуатация петель Kubica Koblenz: СМАЗКА
Петли Krona Koblenz не требуют смазки в течение всего срока службы. |
| В петлях установлены специальные вставки из самосмазывающегося износостойкого композита, которые разделяют все точки трения между подвижными деталями петли. Если петлю смазать маслом или спреем, то на петлю c течением времени налипнет пыль, что может привести к тугому ходу петли, т.  е. к перегрузке, это значительно уменьшит срок эксплуатации петли. е. к перегрузке, это значительно уменьшит срок эксплуатации петли. |
Эксплуатация скрытых петель Kubica Koblenz: ЦВЕТ ПЕТЕЛЬ
НЕ КРАСЬТЕ ПЕТЛИ! |
| Петли Koblenz имеют большую коллекцию цветных накладок. Не наносите на петли химические спреи для покраски петель. Это может повредить механизм петли. |
Эксплуатация скрытых петель Kubica Koblenz:
Техническое обслуживание двери |
| При эксплуатации двери из-за сложных климатических условий, усиленной эксплуатации (аэропорты, школы) необходимо проводить плановое техническое обслуживание противопожарных дверей. Наши рекомендации:
|
Для выполнения осмотра петли необходимо |
Регулировочные и блокировочные винты |
Эксплуатация петель Kubica Koblenz: ЧИСТКА
| Петля из сплава ZAMAK с алюминиевыми декоративными колпачками |
Мы советуем:
ВНИМАНИЕ:
|
 При установке петель на наружные двери или двери установленные в помещениях, где может происходить контакт с химическими веществами, вызывающими пятна
При установке петель на наружные двери или двери установленные в помещениях, где может происходить контакт с химическими веществами, вызывающими пятна Искры могут повредить поверхность петли и спровоцировать появление ржавчины.
Искры могут повредить поверхность петли и спровоцировать появление ржавчины.Соблюдайте правила техники безопасности
|

Скрытые петли Koblenz, Eclipse:
Выбор петли по параметрам: вес двери, толщина двери, размеры петли, материал петли.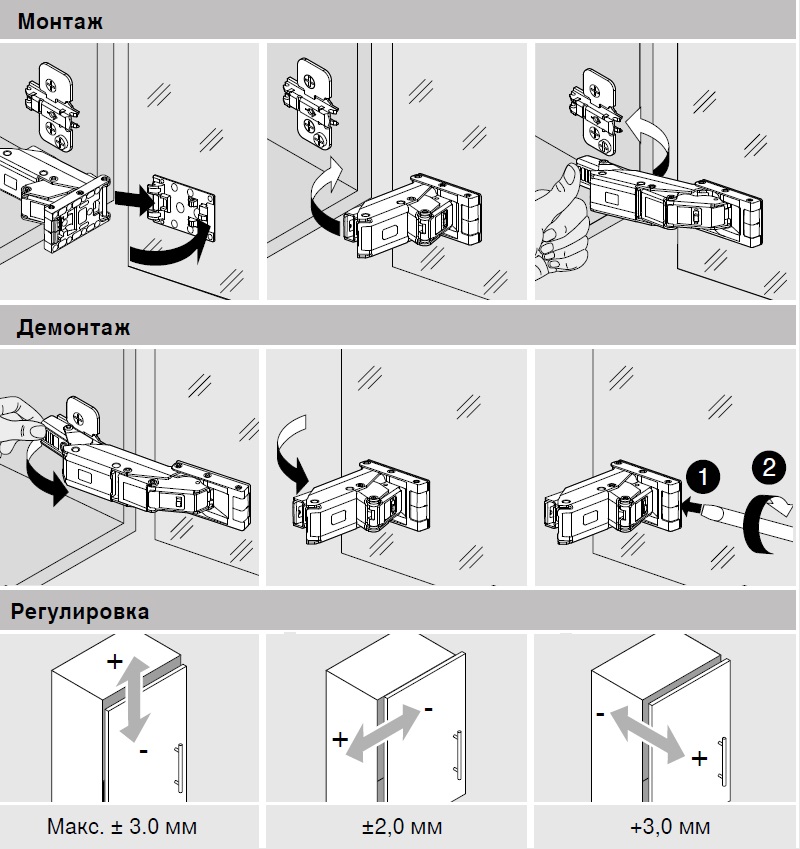 Определение типа имеющейся петли: по размерам скрытой петли и её виду. |
| K1000-3 | K1000-30 | K1019 | |
| K1060 | K2000 | K2400 | |
| K2460 | K2700 | K2760 | |
| K2780 | K2810 | K3000 | |
| K5080 | K6100 | K6200 | |
| K6300 | K6360-38 | K6360-45 | |
| K6400 | K6700 | K6900 | |
| K7000 | K7080 | K7120 | |
| K7200 | K7316 | K8000 | |
| K8060 | K8080 | K8120 | |
| K8080 | K8120 | DIMA | |
| Пластина | Eclipse2 | Eclipse3 | |
Eclipse3. 2 2 | Eclipse3.2s | Eclipse4.1 | |
| Шпингалет | |||
| Карточные петли | Барные петли | Стопор магнит | |
| Palladium | Justor | Fantom | |
| Amig 405 |
Сведения на сайте не являются официальной офертой и носят рекомендательный характер
| ООО «ЦЕФ» | ИП ЗахаровСК | ||||
| Дверная фурнитура Скрытые петли купить в СПб: 195027, Россия, Санкт-Петербург, Большеохтинский пр. дом 35 | |||||
| Понедельник Вторник Среда Четверг Пятница | с 11 до 18 с 10 до 18 с 10 до 18 с 10 до 18 с 10 до 15 | ||||
| Суббота Воскресенье | Выходной | ||||
| Просьба присылать заявки на E-mail: Модель.  Цвет. Количество. Цвет. Количество. | [email protected] [email protected] | ||||
| Телефон/факс: Мобильный телефон: | 8(812) 227-89-09 +7(911) 920-16-27 | ||||
Как настроить ПИД-контур
Искусство настройки ПИД-контура заключается в том, чтобы настроить его выход (OP) для максимально быстрого перемещения переменной процесса (PV) к заданному значению ( отклик ), минимизировать перерегулирование, а затем удерживать переменную стабильный в заданном значении без чрезмерных изменений OP ( стабильный ).
Определения
- PID = пропорциональный, интегральный, производный алгоритм. Это не P&ID, а схема трубопроводов (или процессов) и приборов.
- PV = Переменная процесса — величина, используемая в качестве обратной связи, обычно измеряемая прибором. Также иногда называется «MV» — измеряемое значение.
- SP = SetPoint – требуемое значение для PV.
- OP = OutPut – сигнал устройству, которое может изменять PV – часто это клапан, заслонка или задание скорости насоса. Часто называется «CV» — контролируемая ценность.
- Перерегулирование = когда PV проходит дальше SP, чем требуется.
 Также иногда называется «MV» — измеряемое значение.
Также иногда называется «MV» — измеряемое значение.- ПИД-контур в ручном (в отличие от автоматический ) меняет свой OP только по запросу оператора.
- Петля в удаленном (также известном как каскад) имеет свою SP, автоматически регулируемую внешней логикой. В local SP меняется только оператором.
- A прямого действия контур ПИД-регулятора увеличивает свое OP в ответ на увеличение PV, в то время как контур обратного действия уменьшает свое OP. «Обычные» петли имеют обратное действие. Контуры, контролирующие уровень или давление через клапан на выходе, или температуру через охлаждение, как правило, имеют прямое действие – «обратные» контуры.
- Ошибка = разница между PV и SP.
 Контуры, контролирующие уровень или давление через клапан на выходе, или температуру через охлаждение, как правило, имеют прямое действие – «обратные» контуры.
Контуры, контролирующие уровень или давление через клапан на выходе, или температуру через охлаждение, как правило, имеют прямое действие – «обратные» контуры.Перерегулирование
Уже знаете основы настройки ПИД-регулятора? Ознакомьтесь с нашей статьей Advanced PID Loop Tuning Methods
Узнайте, как наша команда может помочь улучшить качество, повысить эффективность и снизить риски
Три основных параметра настройки ПИД-регулятора
Примечание: в демонстрационных целях на приведенных ниже диаграммах показаны отдельные отклики действий, где PV равно НЕ затронуты OP. Обычно на PV влияет изменение OP, и поэтому он возвращается к SP в результате реакции OP.
Также называется полосой пропорциональности или П-усиление . Коэффициент усиления определяет, насколько сильно изменится OP из-за изменения ошибки (из-за изменения PV и/или изменения SP). Это в основном исправляет OP на основе сбоев по мере их возникновения. «Усиление» подразумевает, что большее число будет иметь больший эффект. «Полоса пропорциональности» подразумевает обратное. P-усиление = 100% / P-диапазон.
Это в основном исправляет OP на основе сбоев по мере их возникновения. «Усиление» подразумевает, что большее число будет иметь больший эффект. «Полоса пропорциональности» подразумевает обратное. P-усиление = 100% / P-диапазон.
Получить только ответ
Также называется интеграл или I-усиление , сброс определяет, насколько изменится ОР с течением времени из-за ошибки (независимо от направления движения ошибки). Это приводит к стабильному PV, который находится вне SP, к SP. Сброс или I-gain подразумевает, что большее число будет иметь больший эффект. Интеграл подразумевает обратное. Сброс [сбросов в минуту] = 60 / интеграл [секунд на сброс].
Сбросить только ответ
Preact
Также называемый производной или D-gain , preact определяет, насколько изменится OP из-за изменения направления ошибки или PV. Воздействие на PV, а не на ошибку, является опцией в некоторых циклах. Это, как правило, лучше, потому что нежелательно поднимать OP при изменении SP.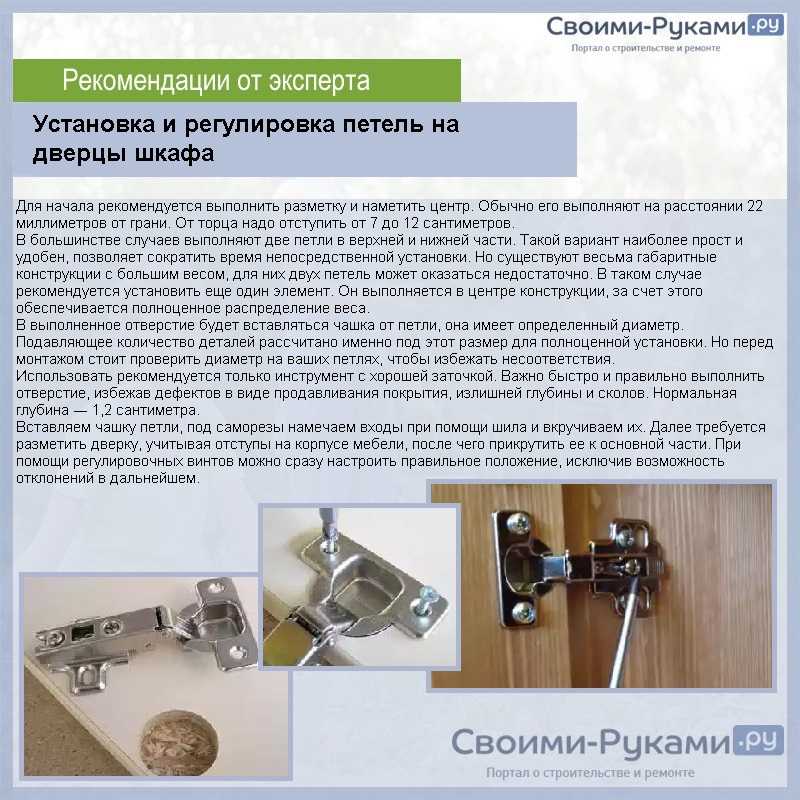 Он называется предварительным, потому что позволяет циклу «предвидеть» сбои, когда они начинают происходить, и быстро реагировать.
Он называется предварительным, потому что позволяет циклу «предвидеть» сбои, когда они начинают происходить, и быстро реагировать.
Только предварительный ответ
Действия, работающие вместе
Когда PV приближается к SP, пропорциональные и интегральные функции работают в противоположных направлениях, чтобы заставить PV правильно настроенного контура быстро добраться до SP без чрезмерного перерегулирования. Для типичного контура обратного действия пропорциональная схема будет пытаться закрыть OP по мере того, как PV будет приближаться к SP, а интеграл будет пытаться открыть OP, поскольку PV ниже SP. По мере приближения PV к SP интегральное воздействие уменьшается, в результате чего PV плавно тормозится в SP.
Усиление и сброс вместе
Начальная настройка контура
Цель настройки ПИД-контура — сделать его стабильным, чувствительным и свести к минимуму перерегулирование. Эти цели, особенно две последние, противоречат друг другу. Вы должны найти компромисс между целями, который приемлемо удовлетворяет их все. Технологические требования и физические ограничения будут определять баланс между величиной допустимого превышения, а также требованием к быстродействию. Основными факторами, определяющими пределы чувствительности петли, являются:
Вы должны найти компромисс между целями, который приемлемо удовлетворяет их все. Технологические требования и физические ограничения будут определять баланс между величиной допустимого превышения, а также требованием к быстродействию. Основными факторами, определяющими пределы чувствительности петли, являются:
- Величина изменения PV в результате ступенчатого изменения OP.
- Время от момента изменения OP до момента, когда изменения начинают проявляться в PV,
- Время, когда PV достигает своего нового уровня. Поскольку PV обычно приближается к своему новому уровню асимптотически, для этой постоянной времени мы часто используем время, которое требуется переходной характеристике системы для достижения 1-1/e, или около 63% расстояния от начального до конечного значения.
Перед настройкой петли убедитесь, что у вас есть хороший пакет трендов. Наблюдайте за PV, SP, OP и другими внешними переменными, которые, как вы подозреваете, могут вместе влиять на PV. Охарактеризуйте цикл, выполняя пошаговые изменения в ручном режиме в пределах диапазона OP и обратно, и запишите эти три фактора. Проход через диапазон в обоих направлениях ценен для количественной оценки линейность и гистерезис системы.
Охарактеризуйте цикл, выполняя пошаговые изменения в ручном режиме в пределах диапазона OP и обратно, и запишите эти три фактора. Проход через диапазон в обоих направлениях ценен для количественной оценки линейность и гистерезис системы.
Три фактора отклика
Линейность : Если одно и то же изменение OP по всей шкале приводит к одинаковому изменению PV в каждой точке, система является линейной . Но если изменение в одной части диапазона ОР приводит к большему изменению PV, чем такое же изменение ОР в другом диапазоне, система является нелинейной .
Линейный ОП
Нелинейный ОП
Гистерезис : Некоторые устройства будут выдавать разные PV для одного и того же OP в зависимости от того, поднялся или опустился OP, чтобы попасть туда. Клапан может пропускать 25 галлонов в минуту после перехода с 20% на 30%, но 30 галлонов в минуту после перехода с 40% на 30%.
Гистерезис OP
Две основные категории PV: частицы и масса
Свойства частиц — это те, в которых жидкость в трубе может иметь разные свойства в разных областях, так что жидкость необходимо смешивать или перемещать, чтобы изменить свойство при измерении PV точка. Свойства частиц включают температуру, pH, проводимость и т. д. Они имеют тенденцию иметь значительную задержку между изменением OP и началом изменения PV (№ 2 выше), и поэтому могут быть полезны производные действия.
Объемные свойства описывают состояние жидкости в целом таким образом, что оно изменяется везде в трубе или сосуде (для практических целей) одновременно. Примеры: расход, уровень и давление. Как правило, эти PV сразу начинают показывать результат изменения OP (даже если постоянная времени для завершения изменения велика) и не нуждаются в какой-либо производной.
Другая классификация PV: некоторые (например, поток) увеличиваются при увеличении OP и уменьшаются при уменьшении OP. Они должны характеризоваться, как показано выше, — им обычно требуется более интегральное и минимальное П-усиление. Для других (например, уровень) направление (скорее наклон, чем значение) PV относится к OP. Для последнего характеристика более тонкая — вы хотите охарактеризовать наклон PV для различных OP вместо его значения. Иногда им требуется коэффициент усиления от среднего до высокого и менее интегральный.
Они должны характеризоваться, как показано выше, — им обычно требуется более интегральное и минимальное П-усиление. Для других (например, уровень) направление (скорее наклон, чем значение) PV относится к OP. Для последнего характеристика более тонкая — вы хотите охарактеризовать наклон PV для различных OP вместо его значения. Иногда им требуется коэффициент усиления от среднего до высокого и менее интегральный.
Параметры запуска
Контуры, в которых PV быстро изменяется из-за изменения OP (поток, давление или уровень в сосудах с быстрым оборотом), должны иметь низкое усиление P (возможно, 0,2) и более высокое значение сброса (1,5–10 об/мин). Петли, в которых PV изменяется медленно или меняет свое направление движения из-за изменения OP (температуры и уровня в сосудах с медленным оборотом), обычно требуют высокого усиления (3–100) и низкого сброса (0,05–0,3).
Эти рекомендуемые начальные параметры основаны на одинаковых входных и выходных диапазонах. Некоторые контроллеры обрабатывают параметры настройки на основе процента диапазона, в то время как другие не делают эту коррекцию. Если пролеты разные, то нужно будет внести коррективы в сами параметры. Например, если расход через трубу может составлять от 0 до 10 000 галлонов в минуту, а скорость частотно-регулируемого привода регулируется от 0 до 100 %, начальное усиление и сброс должны быть равны 0,004 и 0,02 вместо 0,4 и 2,0.
Некоторые контроллеры обрабатывают параметры настройки на основе процента диапазона, в то время как другие не делают эту коррекцию. Если пролеты разные, то нужно будет внести коррективы в сами параметры. Например, если расход через трубу может составлять от 0 до 10 000 галлонов в минуту, а скорость частотно-регулируемого привода регулируется от 0 до 100 %, начальное усиление и сброс должны быть равны 0,004 и 0,02 вместо 0,4 и 2,0.
Существуют численные методы, в которых определяется собственная резонансная частота системы и устанавливаются соответствующие параметры, но итеративный, интуитивный подход может оказаться более полезным. Это приблизит константы к тому, где они должны быть для точной настройки. Не стесняйтесь возвращать петлю в ручной режим, если петля сходит с ума или при изучении тренда.
Тонкая настройка
Для достижения цели создания чувствительного и стабильного контура с минимальным перерегулированием необходимо протестировать настройку в ответ на сбои и в установившемся режиме. Сбои могут быть вызваны:
- Изменением SP
- Переводом контура в ручной режим, изменением OP, затем возвратом к автоматическому это, шагнув SP. Здесь полезно даже очень небольшое изменение. Пропорциональное значение вызовет немедленный скачок OP, тогда интеграл заставит OP продолжить линейное изменение в том же направлении. Когда PV начинает двигаться, пропорциональное действие заставит OP двигаться назад в обратном направлении, а интегральное действие будет уменьшаться по мере приближения PV к SP. Перерегулирование часто вызвано слишком большим интегральным и/или недостаточным пропорциональным значением.
Слишком много сброса
OP должен начать движение назад задолго до того, как PV достигнет SP. Количество времени между пиком и попаданием PV в SP зависит от характера петли.
Если пик приходит слишком поздно, вам нужен более пропорциональный или менее интегральный. Если пик наступает слишком рано, вам нужно менее пропорциональное или более интегральное. Ранний пик приведет к выравниванию PV до того, как он достигнет SP, в результате чего OP и PV будут колебаться на пути к своим новым установившимся значениям.Переключение на SP
После грубой настройки петли переведите ее в ручной режим и измените либо SP, либо OP, дайте ей стабилизироваться, а затем верните ее в автоматический режим. Затем контур переместит PV в SP, но только с интегралом — без начального импульса OP из пропорционального. Если ОП движется слишком медленно, вам нужно больше интеграла. Длительная задержка между изменением OP и окончанием результирующего изменения PV диктует более низкое интегральное значение. Введите производную, если вы видите, что скачок в OP был бы полезен, когда PV меняет направление в начале расстройства.
Это итеративный метод — каждое изменение одного параметра приводит к изменению идеального значения других параметров.
Перемещайтесь между методами рассогласования и стабильностью установившегося состояния и убедитесь, что вы проверили настройку для всего диапазона возможных SP. Если система нелинейна (см. выше), контур, который стабилен при более высоких потоках, может колебаться. резко при более низких потоках, и петля, которая реагирует на низкие потоки, может быть вялой при более высоких потоках. ПИД-контур с зоной нечувствительности управления иногда может обеспечить приемлемое управление, несмотря на эту проблему. См. другие способы работы с клапанами и демпферами с зоной нечувствительности в расширенных методах настройки контура ПИД-регулятора.Диагностика причин колебаний
Если OP и PV достигают максимума одновременно, колебания управляются пропорциональным образом.
Слишком большое усиление
Если OP достигает пика, когда PV пересекает свою среднюю точку и наоборот (так что волны PV и OP сдвинуты по фазе на 90°), колебание является интегральным. Некоторые колебания вызваны другими факторами в системе — переведите петлю в ручной режим, чтобы увидеть, продолжает ли она колебаться, если вы подозреваете, что настраиваемая петля не вызывает колебания.
Слишком большой сброс
Иногда допустимы колебания. Например, целью контроля уровня в барабане котла является, в первую очередь, предотвращение срабатывания при низком или высоком уровне. Умеренное количество колебаний в устойчивом состоянии является хорошим компромиссом, чтобы получить достаточную дополнительную реакцию, чтобы избежать отключения после значительных сбоев.
Обратите внимание, что приводы (особенно клапаны с электроприводом) с зоной нечувствительности и/или ограниченным рабочим циклом ВСЕГДА будут качаться при подключении к традиционному ПИД-контуру независимо от параметров настройки. Вы можете сказать, что это происходит, посмотрев на тренд — PV будет плоским, в то время как OP снижается (из-за интеграла), затем PV перескакивает на другую сторону SP, и картина меняется на противоположную. Узнайте, как работать с клапанами и демпферами с зоной нечувствительности, в разделе «Расширенные методы настройки контура ПИД-регулятора».
Колебания в ограниченной зоне нечувствительности
Баланс целей настройки
Правильно настроенный контур уравновешивает требования стабильности, отклика и низкого перерегулирования.
Настройте петлю, отрегулировав три параметра настройки, чтобы петля хорошо реагировала на различные нарушения и устойчивые ситуации. Некоторые расширенные методы настройки ПИД-регулятора могут потребоваться, если такие проблемы, как нелинейность, зона нечувствительности, гистерезис или измеримые внешние нарушения, не позволяют удовлетворительно настроить контур с помощью описанных выше основных методов.Работа с экспертом
Если у вас возникли проблемы с настройкой контура ПИД-регулятора, мы рекомендуем вам обратиться к одному из наших экспертов по технологическим решениям. Хотя это руководство предназначено для того, чтобы помочь вам настроить контур ПИД-регулятора и устранить распространенные проблемы, это не исчерпывающий список. Пожалуйста, свяжитесь с нами сегодня, чтобы обсудить ваше приложение и конкретные проблемы, которые могут возникнуть у вас с контуром PID.
Узнайте, как наша команда может помочь улучшить качество, повысить эффективность и снизить риски
Основы настройки контура: сложные реакции процесса
Резюме
Джеймс Билл
Двумя наиболее распространенными категориями реакции процесса в процессах промышленного производства являются саморегулирующиеся и интегрирующие .
Реакция саморегулирующегося процесса на ступенчатое изменение входного сигнала характеризуется изменением переменной процесса, которая движется к новому значению и стабилизируется (или саморегулируется). Реакция интегрирующего процесса на ступенчатое изменение входа характеризуется изменением наклона переменной процесса. С точки зрения пропорционально-интегрально-дифференциального (ПИД) регулятора процесса, выход ПИД-регулятора является входом процесса. Выход процесса, переменная процесса (PV), является входом для ПИД-регулятора.В выпусках InTech за март/апрель (www.isa.org/intech/201604basics) и май/июнь (www.isa.org/intech/201606basics) я представил настройку ПИД-регулятора для базовой «интеграции » и «саморегулирующиеся реакции первого порядка». Эти отклики показаны на рисунке 1. Однако в некоторых случаях отклик процесса имеет более сложную динамику, чем рассмотренные в этих двух статьях. Следующие сложные реакции процессов наблюдались в процессах многих отраслей промышленности, включая химическую, нефтеперерабатывающую, нефтехимическую, целлюлозно-бумажную, нефтегазовую и фармацевтическую.
- саморегулирующийся, второго порядка, с избыточным демпфированием
- саморегулирующийся, второго порядка, с недостаточным демпфированием
- саморегулирующийся, второй порядок плюс вывод
- саморегулирующийся, плюс опережающий провод второго порядка с перерегулированием
- саморегулирующийся, второго порядка, неминимальная фаза
- интегратор плюс запаздывание первого порядка
- интегратор плюс вывод первого порядка
- интегратор плюс неминимальная фаза
Двумя наиболее распространенными из этих сложных динамических характеристик являются «саморегулирующаяся, второго порядка, передемпфированная» и «интегратор плюс запаздывание первого порядка».
Еще одна тема, которую часто упускают из виду при настройке ПИД-регуляторов, — это понятие резонанса . Когда ПИД-регулятор используется в процессе, который имеет мертвое время (а оно есть у всех!), отклик замкнутого контура имеет резонансную частоту, при которой он будет усиливать изменчивость с частотными составляющими на резонансной частоте или близкой к ней.
Чем агрессивнее настройка, тем выше усиление.В этой статье рассматривается настройка ПИД-регулятора для двух наиболее распространенных сложных динамических характеристик — «саморегулирующийся, второго порядка, передемпфированный» и «интегратор плюс запаздывание первого порядка» — и концепция резонанса.
Трудности
Идеальное соответствие модели реальному процессу – редкость. Таким образом, цель состоит в том, чтобы получить достаточно «хорошую» подгонку модели. Это включает в себя выбор типа модели, которая является достаточно «сложной», чтобы хорошо соответствовать реакции процесса.
Двумя наиболее распространенными сложными динамическими параметрами являются саморегулирующийся, второго порядка, передемпфирующий (далее именуемый «саморегулирующийся второй порядок») и интегратор плюс запаздывание первого порядка (далее именуемый «интегратор плюс запаздывание»). На рис. 1 противопоставлена реакция саморегулирующегося первого порядка на саморегулирующийся второй порядок и интегратора на интегратор плюс запаздывание.
Для оптимизации процесса должна быть выбрана реакция замкнутого контура метода настройки производительность, которая может требовать или не требовать оптимизации производительности контура управления . Для оптимизации производительности процесса может потребоваться, чтобы контуры установки имели скоординированный отклик: либо очень медленный отклик для использования мощности процесса для компенсации изменчивости, либо очень быстрый отклик для максимального регулирования возмущений нагрузки.
Рис. 1. Сравнение саморегулирующейся реакции первого и второго порядка, а также сравнение интегратора с интегратором плюс запаздывающая характеристика
Настройка саморегулирующегося процесса второго порядка
Методика настройки, называемая лямбда-настройкой , решает эти проблемы. Метод настройки лямбда позволяет пользователю выбрать время отклика с обратной связью, называемое лямбда , и рассчитать соответствующую настройку для достижения желаемого времени отклика.
Время лямбда выбирается для достижения желаемых целей процесса и критериев стабильности. Это может привести к выбору малой лямбды для хорошего регулирования нагрузки, большой лямбды для минимизации изменений на выходе контроллера и управляющей переменной, позволяющей PV отклоняться от заданного значения, или где-то между этими двумя крайними значениями. Что еще более важно, лямбда цикла может использоваться для координации ответов многих циклов, чтобы уменьшить взаимодействие и изменчивость.Настройка лямбда-функции для саморегулирующихся процессов может привести к тому, что отклик замкнутого контура будет медленнее или быстрее, чем время отклика процесса без обратной связи. Хотя лямбда определяется как постоянная времени реакции процесса с обратной связью на ступенчатое изменение уставки контроллера, способность регулирования нагрузки также является функцией лямбда контура. Реакция на ступенчатое изменение уставки и ступенчатое изменение нагрузки для реакции саморегулирующегося процесса с настройкой лямбда показана на рисунке 2.
Рис. 2. Реакция лямбда-настройки для саморегулирующегося процесса на ступенчатую уставку и ступенчатое изменение нагрузки
Реакции саморегулирующихся процессов обычно включают время простоя и обычно могут быть аппроксимированы реакцией «первого порядка плюс время простоя» или «второго порядка плюс время простоя, передемпфирование». В этой статье описывается процедура настройки лямбда, когда отклик процесса может быть лучше всего аппроксимирован последней. Настройка лямбда для отклика второго порядка плюс мертвое время может быть аппроксимирована с помощью ручного анализа и расчетов. Для более точной настройки требуется более тщательный анализ.
Процедура
Метод лямбда-настройки для саморегулирующихся процессов состоит из трех этапов:
- Определение динамики процесса.
- Выберите требуемую скорость отклика замкнутого контура, лямбда.
- Рассчитайте необходимые константы настройки ПИД-регулятора.
На рис.
3 показаны динамические параметры саморегулирующегося процесса второго порядка, которые включают мертвое время (Td) в единицах времени; первичная постоянная времени (tau 1), в единицах времени; вторичная постоянная времени (tau 2), в единицах времени; и усиление процесса (Kp) в единицах процента PV регулятора/процента выходного сигнала регулятора. Обычно выполняются несколько ступенчатых тестов; результаты проверяются на согласованность; средняя динамика процесса рассчитывается и используется для расчета параметров настройки. Если выходной сигнал контроллера направляется непосредственно на регулирующий клапан, любая значительная зона нечувствительности в клапане снизит усиление процесса, если выходной шаг был изменением направления. Если выход контроллера каскадируется до уставки «ведомого» контура, то подчиненный контур должен быть настроен в первую очередь.Рис. 3. Переходная характеристика, показывающая динамику процесса второго порядка с избыточным демпфированием саморегулирующегося процесса, которая включает мертвое время, первичную постоянную времени, вторичную постоянную времени и усиление процесса.
T98 — это время, необходимое для того, чтобы процесс достиг 98 процентов своего окончательного изменения.Следующим шагом является выбор лямбда для достижения желаемой цели управления процессом для контура в пределах допустимого запаса устойчивости для ожидаемых изменений в динамике процесса. Более короткая лямбда дает более агрессивную настройку с меньшим запасом стабильности. Более агрессивная настройка также имеет большее усиление возмущений с периодом колебаний, близким к резонансному периоду контура. Более длинная лямбда дает менее агрессивную настройку и больший запас стабильности. Нередки случаи, когда динамика процесса, особенно коэффициент усиления процесса, изменяется в 0,5–2 раза. Если испытания в различных условиях показывают, что динамика процесса существенно меняется, то требуется дополнительный запас стабильности. Реакция процесса также может быть «линеаризована» или может использоваться адаптивная настройка.
Если потенциальное изменение в динамике процесса неизвестно, начиная с лямбды, равной трехкратному большему значению мертвого времени или постоянной времени, обеспечивается стабильность, даже если мертвое время удваивается и усиление процесса удваивается.
Если желательно координировать отклик контуров, чтобы избежать значительного взаимодействия, лямбда взаимодействующих контуров может быть выбрана так, чтобы отличаться в пять или более раз. Для каскадных контуров лямбда может быть выбрана таким образом, чтобы ведомый контур каскадной пары имел лямбда 1/5 или меньше главного контура управления.Если используется производная, наименьшее рекомендуемое значение лямбда для саморегулирующегося процесса второго порядка приблизительно равно большему из двух значений: мертвого времени или постоянной времени запаздывания. Если производная не используется, то минимальная лямбда меняется в зависимости от величины вторичной постоянной времени, но находится в пределах двух времен (мертвое время + тау 2). Оба этих нижних предела лямбда приводят к агрессивной настройке с очень низким коэффициентом усиления и запасом по фазе. Таким образом, умеренное увеличение мертвого времени или усиления процесса может вызвать нестабильность контура. Использование правильно настроенного производного действия на самом деле обеспечивает большую стабильность для этой сложной динамики.
С точки зрения стабильности верхний предел лямбда отсутствует. Если лямбда не выбрана на основе скоординированного отклика, хорошей отправной точкой для стабильности для настройки ПИ или ПИД является:
Уравнение 1. Лямбда = 3 × (большее из мертвого времени или постоянной времени) отслеживается в течение определенного периода времени и корректируется, чтобы быть более короткой или более длинной лямбда по мере необходимости.
Последним шагом является расчет параметров настройки на основе динамики процесса. Следует соблюдать осторожность, чтобы использовать согласованные единицы времени для мертвого времени и лямбда. Для саморегулирующейся реакции процесса второго порядка усиление регулятора, время интегрирования и время производной рассчитываются с помощью следующих уравнений. Эти уравнения действительны для серийной (иногда называемой классической или интерактивной) формы реализации PID. Обратите внимание, что при изменении лямбда (λ) изменяется только коэффициент усиления контроллера.
Интегральное время остается равным постоянной времени независимо от выбранной лямбды. Преобразование настройки из формы последовательного ПИД-регулятора в стандартную форму (иногда называемую идеальной, неинтерактивной) представлено в последнем разделе.Уравнение 2. Время интегрирования = Первичная постоянная времени (тау 1)
Уравнение 3. Коэффициент усиления регулятора =
Уравнение 4. Производная времени = вторичная постоянная времени (tau 2)
Пример
Рассмотрим смоделированный регулятор температуры, показанный на рис. 4. Регулятор температуры TIC-302 управляет правильно выбранным регулирующий клапан с высокопроизводительным цифровым позиционером.
Рис. 4. Схема процесса и управления для контура регулирования температуры
На рис. 5 показан пошаговый тест регулятора температуры для определения динамики процесса. Были проанализированы несколько таких шагов и рассчитана средняя динамика процесса. Прирост процесса составляет 1,0% PV/% OUT; мертвое время составляет 20 секунд; первичная постоянная времени составляет 80 секунд; а вторичная постоянная времени равна 60 секундам.
Рис. 5. Ступенчатые тесты без обратной связи саморегулирующегося процесса второго порядка и анализ одноступенчатого отклика с помощью инструментария EnTech.
В этом примере нет требований по «координации отклика контура», поэтому начальное лямбда выбирается равным 3 × (большее из мертвого времени или первичной постоянной времени) = 3 × 80 секунд = 240 секунд.
Теперь настройка для последовательного ПИД-регулятора может быть рассчитана с помощью правил настройки лямбда.
Время интегрирования = Первичная постоянная времени (tau 1) = 80 секунд
Усиление регулятора = = 80 секунд/((1,0) × (240 секунд + 20 секунд)) = 0,31
Производное время = Вторичная постоянная времени (tau 2) = 60 секунд
Если динамика процесса проверена или подтверждена со временем, чтобы быть стабильным в общем рабочем диапазоне, может потребоваться более агрессивная настройка. В следующей таблице показана настройка для различных значений лямбда.
Обратите внимание, что время интегрирования и производной остается одинаковым для всех вариантов лямбда.Лямбда (секунды) Усиление Время интегрирования (секунды) Производное время (секунды) Отношение амплитуд 240 0,31 80 60 1,09 120 0,57 80 60 1,12 80 0,8 80 60 20 (минимальное значение = мертвое время) 2,0 80 60 На рис.
6 показана реакция на ступенчатую уставку и ступенчатое изменение нагрузки для каждого значения лямбда в таблице. Обратите внимание, что настройка стабильна для более коротких значений лямбда, чем начальная точка 3 × (больше мертвого времени или постоянной времени). Однако это при неизменной динамике процесса в симуляторе. Дополнительные тесты реального процесса в различных рабочих условиях помогут определить, насколько постоянна динамика процесса и является ли более агрессивная настройка стабильной и обеспечивает желаемую производительность процесса.Рис. 6. Смоделированная реакция саморегулирующегося процесса второго порядка на ступенчатую уставку и ступенчатое изменение нагрузки с различными значениями лямбда. Обратите внимание, что настройка для лямбда = мертвое время = 20 секунд очень агрессивна и имеет небольшой запас по фазе и коэффициенту усиления.
Настройка интегратора плюс запаздывающий процесс первого порядка
Как и в случае с саморегулирующейся реакцией, первым шагом является определение динамики процесса.
На рис. 7 показано использование пошагового теста на выходе без обратной связи для определения динамических параметров процесса «интегратор плюс запаздывание», которые включают мертвое время (Td) в единицах времени и усиление процесса интегрирования (Kpi) в единицах времени. процентный контроллер PV/единица времени/процентный выход контроллера. Обычно выполняются несколько ступенчатых тестов; результаты проверяются на согласованность; средняя динамика процесса рассчитывается и используется для расчета параметров настройки.Рис. 7. Использование пошагового теста с разомкнутым контуром для определения динамики процесса интегратора плюс запаздывающий процесс.
Следующим шагом является выбор лямбда для достижения желаемой цели управления процессом для контура в пределах допустимого запаса устойчивости для ожидаемых изменений в динамике процесса. К этой реакции процесса относятся те же предупреждения об изменениях в динамике процесса, проблемах с работой регулирующего клапана и необходимости сначала настроить подчиненный контур в каскадной схеме.
Без использования производной минимальное лямбда с учетом требований к стабильности и резонансу составляет примерно 3 × (мертвое время плюс постоянная времени запаздывания). Используя производную, минимальная лямбда, учитывающая требования стабильности и резонанса, приблизительно равна большему из двух значений: мертвого времени или постоянной времени запаздывания. Если выбрана лямбда, близкая к этим пределам, полученную настройку следует протестировать на симуляторе, чтобы проверить ее стабильность и резонанс. Инструменты анализа могут обеспечить более точный расчет значений настройки лямбда и пределов лямбда на основе стабильности и резонанса.Последним шагом является расчет параметров настройки на основе лямбда-выражения и динамики процесса. Следует соблюдать осторожность, чтобы использовать согласованные единицы времени для мертвого времени, постоянной времени запаздывания и лямбда. Для интегратора плюс реакция процесса с запаздыванием первого порядка усиление регулятора, время интеграла и производной вычисляются с помощью следующих уравнений.
Эти уравнения действительны для серийной (иногда называемой классической, интерактивной) формы реализации PID. Обратите внимание, что коэффициент усиления ПИД-регулятора и время интегрирования изменяются при изменении лямбда. Время производной остается одинаковым для всех вариантов лямбда. Преобразование настройки из формы последовательного ПИД-регулятора в стандартную форму (иногда называемую идеальной или неинтерактивной) представлено в последнем разделе.Уравнение 5. Время интегрирования =
Уравнение 6. Коэффициент усиления регулятора =
Уравнение 7. Производное время = постоянная времени запаздывания
Пример
Процесс, показанный на рис. 8, будет использоваться в качестве примера. Регулятор уровня LIC-102 управляет правильно настроенным регулятором расхода FIC-102. Процесс уровня в этих типах приложений обычно имеет интегратор плюс запаздывание.
Рис. 8. Технологическая и регулирующая схема контроля уровня бака деаэратора питательной воды котла
На рис.
9 показан пошаговый тест регулятора уровня LIC-102 для определения динамики процесса. Были проанализированы несколько таких шагов и рассчитана средняя динамика процесса. Прирост процесса составляет 0,005% PV/секунду/%OUT; мертвое время составляет 20 секунд; постоянная времени запаздывания первого порядка составляет 60 секунд.Рис. 9. Ступенчатый тест без обратной связи интегратора плюс процесс с запаздыванием первого порядка и анализ отклика на один скачок
Следующим шагом является выбор лямбды. Одним из методов выбора лямбда является метод «допустимого процентного отклонения PV». Если желательно удерживать %PV в пределах «допустимого отклонения» (AD) от его предыдущего значения из-за скачкообразного изменения нагрузки (MLD, в единицах %OUT контроллера), тогда требуемая лямбда может быть рассчитана из уравнение ниже.
Уравнение 8.
Для этого примера AD = 20%PV, MLD = 50%OUT. Сверху Kpi = 0,005 %PV/сек/%OUT.
Таким образом, лямбда = (2 × 20 % PV)/(0,005 % PV/сек/% OUT × 50 % OUT) = 160 секунд.
Теперь настройку последовательного ПИД-регулятора можно рассчитать с помощью уравнений 5–7.
Время интегрирования = = 2 × 160 секунд + 20 секунд = 340 секунд
Коэффициент усиления регулятора = = (340 секунд)/((0,005 %PV/сек/%OUT) × (160 секунд+20 секунд)2)
= 2,1
Производное время = постоянная времени запаздывания = 60 секунд
В следующей таблице показана настройка для нескольких различных значений лямбда. Обратите внимание, что усиление ПИД-регулятора и время интегрирования изменяются по мере изменения лямбда. Время производной остается одинаковым для всех вариантов лямбда.
Лямбда (секунды) Усиление Время интегрирования (секунды) Производное время (секунды) 240 1,48 500 60 160 2,1 340 60 60 (минимальное значение ~ больше запаздывания или мертвого времени) 904:00 4,4 140 60 На рис.
10 показана реакция на ступенчатую уставку и ступенчатое изменение нагрузки для каждого значения лямбда в таблице. Обратите внимание, что настройка стабильна для гораздо более коротких значений лямбда, чем начальная точка 3 × (больше мертвого времени или постоянной времени). Однако это при постоянной динамике процесса в симуляторе. Дополнительные тесты реального процесса в различных рабочих условиях помогут определить, насколько постоянна динамика процесса.Рис. 10. Смоделированная реакция интегратора плюс запаздывающий процесс для ступенчатой уставки и ступенчатого изменения нагрузки с различными значениями лямбда. Обратите внимание, что настройка для лямбда = мертвое время = 60 секунд очень агрессивна и имеет небольшой запас по фазе и коэффициенту усиления.
Достижение целей процесса
Большинство опубликованных методов настройки ПИД-регулятора разработаны для оптимальной работы контура , а не обязательно оптимального процесса производительность.
Оптимизация производительности процесса может потребовать, чтобы контуры в установке имели скоординированный отклик, очень медленный отклик для использования мощности процесса для компенсации изменчивости или очень быстрый отклик для максимального регулирования возмущений нагрузки. Метод настройки лямбда обеспечивает возможность настройки ПИД-регуляторов в технологической системе для достижения целевых показателей производительности процесса независимо от требований контура. Метод лямбда-настройки можно использовать для всех общих сложных динамических процессов, перечисленных во введении.Резонанс контура и усиление вариативности
Комбинация ПИД-регулятора (с П-, ПИ- или ПИД-настройкой) используется в процессе, который имеет мертвое время; ответ с обратной связью будет иметь резонансную частоту, на которой он будет усиливать изменчивость с частотными составляющими на резонансной частоте или около нее. И чем агрессивнее настройка, тем выше усиление. На рисунке 11 показан график частотной характеристики (диаграмма Боде) возмущения PV для температурного контура TIC-301, используемого в примере для саморегулирующейся реакции процесса второго порядка.
Агрессивная настройка лямбда = мертвое время = 20 секунд приводит к 82-процентному усилению любой изменчивости с периодом около 138 секунд. Другими словами, если существует изменчивость с периодом около 138 секунд при ручном управлении контроллером, перевод контроллера в автоматический режим увеличит изменчивость на 82 процента! Интересно, что предельный цикл плохо работающего регулирующего клапана может иметь период около этого значения! На рис. 12 показано представление данных во временном ряду, иллюстрирующее эту концепцию. На рисунке 13 показано, как агрессивность настройки влияет на коэффициент усиления. В процессе настройки контроллера следует учитывать концепцию усиления резонанса и вариативности.Рис. 11. График частотной характеристики (Боде) отклика ПИД-регулятора с обратной связью, показывающий резонансную частоту и коэффициент усиления
Рис. частоты
Рисунок 13. Резонанс в зависимости от скорости отклика контура управления
Преобразование настройки из серийной формы ПИД в стандартную форму
Уравнения 9–11, приведенные ниже, можно использовать для преобразования настройки из формы последовательного ПИД-регулятора в стандартную форму ПИД-регулятора.
Уравнения основаны на параметрах настройки последовательного ПИД-регулятора со следующими единицами измерения.- коэффициент усиления контроллера: %OUT/%PV (часто говорят, что «нет единиц измерения»)
- время интегрирования: секунды
- производная времени: секунды
Уравнение 9. Коэффициент усиления стандартного ПИД-регулятора = Коэффициент усиления × (время интегрирования + время дифференцирования)/(время интегрирования)
Уравнение 10. Время интегрирования стандартного ПИД-регулятора = (время интегрирования + время дифференцирования)
Уравнение 11. Время стандартной производной ПИД-регулятора = (время интегрирования × время производной)/(время интегрирования + время производной)
Полезные модели
Было сказано, что «все модели процессов неверны, но некоторые из них полезны». Из более чем 4000 откликов процессов, которые я проанализировал за последние 15 лет, я никогда не измерял одни и те же точные параметры модели для разных тестов одного и того же процесса! Таким образом, целью настройки на основе модели процесса является определение разумного соответствия конкретной модели процесса.
 Если пик приходит слишком поздно, вам нужен более пропорциональный или менее интегральный. Если пик наступает слишком рано, вам нужно менее пропорциональное или более интегральное. Ранний пик приведет к выравниванию PV до того, как он достигнет SP, в результате чего OP и PV будут колебаться на пути к своим новым установившимся значениям.
Если пик приходит слишком поздно, вам нужен более пропорциональный или менее интегральный. Если пик наступает слишком рано, вам нужно менее пропорциональное или более интегральное. Ранний пик приведет к выравниванию PV до того, как он достигнет SP, в результате чего OP и PV будут колебаться на пути к своим новым установившимся значениям. Перемещайтесь между методами рассогласования и стабильностью установившегося состояния и убедитесь, что вы проверили настройку для всего диапазона возможных SP. Если система нелинейна (см. выше), контур, который стабилен при более высоких потоках, может колебаться. резко при более низких потоках, и петля, которая реагирует на низкие потоки, может быть вялой при более высоких потоках. ПИД-контур с зоной нечувствительности управления иногда может обеспечить приемлемое управление, несмотря на эту проблему. См. другие способы работы с клапанами и демпферами с зоной нечувствительности в расширенных методах настройки контура ПИД-регулятора.
Перемещайтесь между методами рассогласования и стабильностью установившегося состояния и убедитесь, что вы проверили настройку для всего диапазона возможных SP. Если система нелинейна (см. выше), контур, который стабилен при более высоких потоках, может колебаться. резко при более низких потоках, и петля, которая реагирует на низкие потоки, может быть вялой при более высоких потоках. ПИД-контур с зоной нечувствительности управления иногда может обеспечить приемлемое управление, несмотря на эту проблему. См. другие способы работы с клапанами и демпферами с зоной нечувствительности в расширенных методах настройки контура ПИД-регулятора.
 Настройте петлю, отрегулировав три параметра настройки, чтобы петля хорошо реагировала на различные нарушения и устойчивые ситуации. Некоторые расширенные методы настройки ПИД-регулятора могут потребоваться, если такие проблемы, как нелинейность, зона нечувствительности, гистерезис или измеримые внешние нарушения, не позволяют удовлетворительно настроить контур с помощью описанных выше основных методов.
Настройте петлю, отрегулировав три параметра настройки, чтобы петля хорошо реагировала на различные нарушения и устойчивые ситуации. Некоторые расширенные методы настройки ПИД-регулятора могут потребоваться, если такие проблемы, как нелинейность, зона нечувствительности, гистерезис или измеримые внешние нарушения, не позволяют удовлетворительно настроить контур с помощью описанных выше основных методов. Реакция саморегулирующегося процесса на ступенчатое изменение входного сигнала характеризуется изменением переменной процесса, которая движется к новому значению и стабилизируется (или саморегулируется). Реакция интегрирующего процесса на ступенчатое изменение входа характеризуется изменением наклона переменной процесса. С точки зрения пропорционально-интегрально-дифференциального (ПИД) регулятора процесса, выход ПИД-регулятора является входом процесса. Выход процесса, переменная процесса (PV), является входом для ПИД-регулятора.
Реакция саморегулирующегося процесса на ступенчатое изменение входного сигнала характеризуется изменением переменной процесса, которая движется к новому значению и стабилизируется (или саморегулируется). Реакция интегрирующего процесса на ступенчатое изменение входа характеризуется изменением наклона переменной процесса. С точки зрения пропорционально-интегрально-дифференциального (ПИД) регулятора процесса, выход ПИД-регулятора является входом процесса. Выход процесса, переменная процесса (PV), является входом для ПИД-регулятора.
 Чем агрессивнее настройка, тем выше усиление.
Чем агрессивнее настройка, тем выше усиление.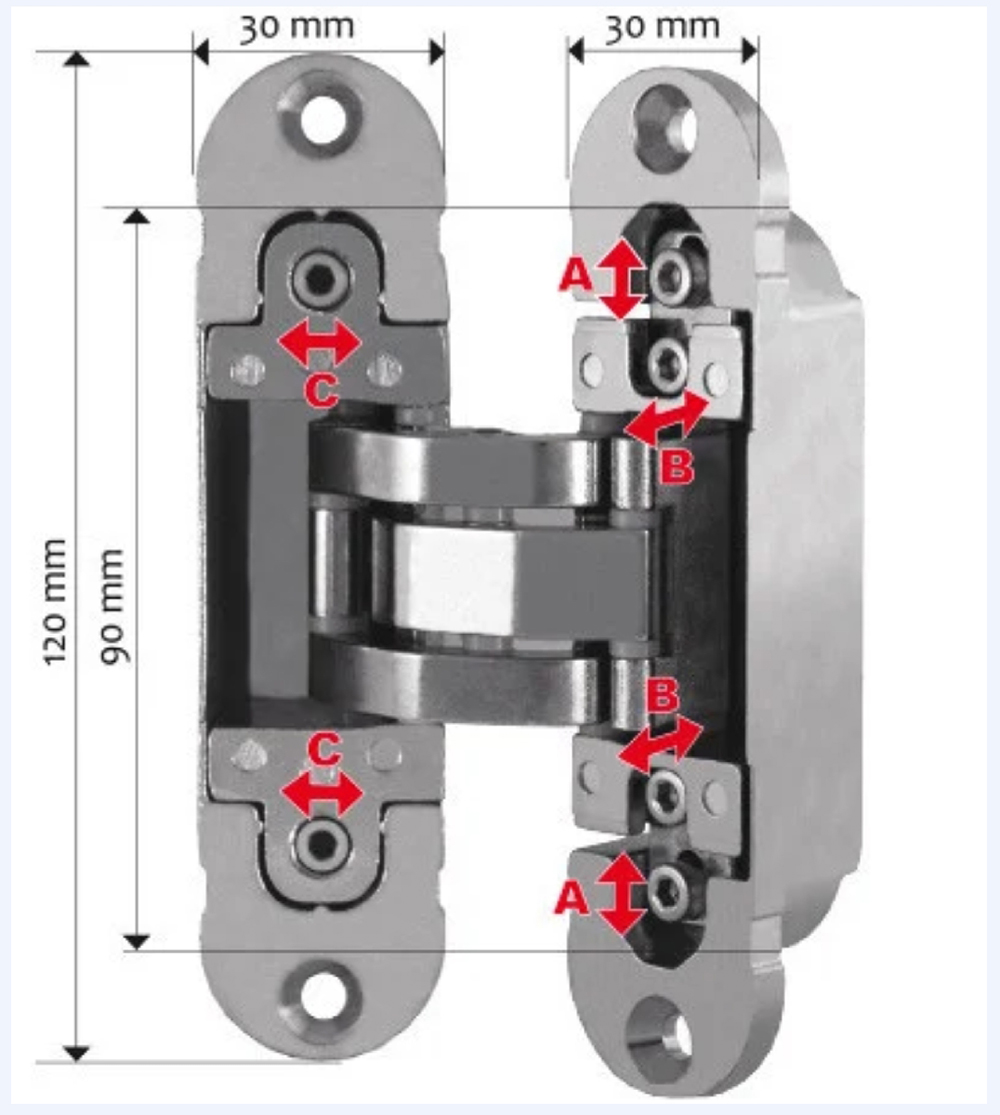
 Время лямбда выбирается для достижения желаемых целей процесса и критериев стабильности. Это может привести к выбору малой лямбды для хорошего регулирования нагрузки, большой лямбды для минимизации изменений на выходе контроллера и управляющей переменной, позволяющей PV отклоняться от заданного значения, или где-то между этими двумя крайними значениями. Что еще более важно, лямбда цикла может использоваться для координации ответов многих циклов, чтобы уменьшить взаимодействие и изменчивость.
Время лямбда выбирается для достижения желаемых целей процесса и критериев стабильности. Это может привести к выбору малой лямбды для хорошего регулирования нагрузки, большой лямбды для минимизации изменений на выходе контроллера и управляющей переменной, позволяющей PV отклоняться от заданного значения, или где-то между этими двумя крайними значениями. Что еще более важно, лямбда цикла может использоваться для координации ответов многих циклов, чтобы уменьшить взаимодействие и изменчивость.
 3 показаны динамические параметры саморегулирующегося процесса второго порядка, которые включают мертвое время (Td) в единицах времени; первичная постоянная времени (tau 1), в единицах времени; вторичная постоянная времени (tau 2), в единицах времени; и усиление процесса (Kp) в единицах процента PV регулятора/процента выходного сигнала регулятора. Обычно выполняются несколько ступенчатых тестов; результаты проверяются на согласованность; средняя динамика процесса рассчитывается и используется для расчета параметров настройки. Если выходной сигнал контроллера направляется непосредственно на регулирующий клапан, любая значительная зона нечувствительности в клапане снизит усиление процесса, если выходной шаг был изменением направления. Если выход контроллера каскадируется до уставки «ведомого» контура, то подчиненный контур должен быть настроен в первую очередь.
3 показаны динамические параметры саморегулирующегося процесса второго порядка, которые включают мертвое время (Td) в единицах времени; первичная постоянная времени (tau 1), в единицах времени; вторичная постоянная времени (tau 2), в единицах времени; и усиление процесса (Kp) в единицах процента PV регулятора/процента выходного сигнала регулятора. Обычно выполняются несколько ступенчатых тестов; результаты проверяются на согласованность; средняя динамика процесса рассчитывается и используется для расчета параметров настройки. Если выходной сигнал контроллера направляется непосредственно на регулирующий клапан, любая значительная зона нечувствительности в клапане снизит усиление процесса, если выходной шаг был изменением направления. Если выход контроллера каскадируется до уставки «ведомого» контура, то подчиненный контур должен быть настроен в первую очередь. T98 — это время, необходимое для того, чтобы процесс достиг 98 процентов своего окончательного изменения.
T98 — это время, необходимое для того, чтобы процесс достиг 98 процентов своего окончательного изменения. Если желательно координировать отклик контуров, чтобы избежать значительного взаимодействия, лямбда взаимодействующих контуров может быть выбрана так, чтобы отличаться в пять или более раз. Для каскадных контуров лямбда может быть выбрана таким образом, чтобы ведомый контур каскадной пары имел лямбда 1/5 или меньше главного контура управления.
Если желательно координировать отклик контуров, чтобы избежать значительного взаимодействия, лямбда взаимодействующих контуров может быть выбрана так, чтобы отличаться в пять или более раз. Для каскадных контуров лямбда может быть выбрана таким образом, чтобы ведомый контур каскадной пары имел лямбда 1/5 или меньше главного контура управления.
 Интегральное время остается равным постоянной времени независимо от выбранной лямбды. Преобразование настройки из формы последовательного ПИД-регулятора в стандартную форму (иногда называемую идеальной, неинтерактивной) представлено в последнем разделе.
Интегральное время остается равным постоянной времени независимо от выбранной лямбды. Преобразование настройки из формы последовательного ПИД-регулятора в стандартную форму (иногда называемую идеальной, неинтерактивной) представлено в последнем разделе.
 Обратите внимание, что время интегрирования и производной остается одинаковым для всех вариантов лямбда.
Обратите внимание, что время интегрирования и производной остается одинаковым для всех вариантов лямбда. 6 показана реакция на ступенчатую уставку и ступенчатое изменение нагрузки для каждого значения лямбда в таблице. Обратите внимание, что настройка стабильна для более коротких значений лямбда, чем начальная точка 3 × (больше мертвого времени или постоянной времени). Однако это при неизменной динамике процесса в симуляторе. Дополнительные тесты реального процесса в различных рабочих условиях помогут определить, насколько постоянна динамика процесса и является ли более агрессивная настройка стабильной и обеспечивает желаемую производительность процесса.
6 показана реакция на ступенчатую уставку и ступенчатое изменение нагрузки для каждого значения лямбда в таблице. Обратите внимание, что настройка стабильна для более коротких значений лямбда, чем начальная точка 3 × (больше мертвого времени или постоянной времени). Однако это при неизменной динамике процесса в симуляторе. Дополнительные тесты реального процесса в различных рабочих условиях помогут определить, насколько постоянна динамика процесса и является ли более агрессивная настройка стабильной и обеспечивает желаемую производительность процесса. На рис. 7 показано использование пошагового теста на выходе без обратной связи для определения динамических параметров процесса «интегратор плюс запаздывание», которые включают мертвое время (Td) в единицах времени и усиление процесса интегрирования (Kpi) в единицах времени. процентный контроллер PV/единица времени/процентный выход контроллера. Обычно выполняются несколько ступенчатых тестов; результаты проверяются на согласованность; средняя динамика процесса рассчитывается и используется для расчета параметров настройки.
На рис. 7 показано использование пошагового теста на выходе без обратной связи для определения динамических параметров процесса «интегратор плюс запаздывание», которые включают мертвое время (Td) в единицах времени и усиление процесса интегрирования (Kpi) в единицах времени. процентный контроллер PV/единица времени/процентный выход контроллера. Обычно выполняются несколько ступенчатых тестов; результаты проверяются на согласованность; средняя динамика процесса рассчитывается и используется для расчета параметров настройки. Без использования производной минимальное лямбда с учетом требований к стабильности и резонансу составляет примерно 3 × (мертвое время плюс постоянная времени запаздывания). Используя производную, минимальная лямбда, учитывающая требования стабильности и резонанса, приблизительно равна большему из двух значений: мертвого времени или постоянной времени запаздывания. Если выбрана лямбда, близкая к этим пределам, полученную настройку следует протестировать на симуляторе, чтобы проверить ее стабильность и резонанс. Инструменты анализа могут обеспечить более точный расчет значений настройки лямбда и пределов лямбда на основе стабильности и резонанса.
Без использования производной минимальное лямбда с учетом требований к стабильности и резонансу составляет примерно 3 × (мертвое время плюс постоянная времени запаздывания). Используя производную, минимальная лямбда, учитывающая требования стабильности и резонанса, приблизительно равна большему из двух значений: мертвого времени или постоянной времени запаздывания. Если выбрана лямбда, близкая к этим пределам, полученную настройку следует протестировать на симуляторе, чтобы проверить ее стабильность и резонанс. Инструменты анализа могут обеспечить более точный расчет значений настройки лямбда и пределов лямбда на основе стабильности и резонанса. Эти уравнения действительны для серийной (иногда называемой классической, интерактивной) формы реализации PID. Обратите внимание, что коэффициент усиления ПИД-регулятора и время интегрирования изменяются при изменении лямбда. Время производной остается одинаковым для всех вариантов лямбда. Преобразование настройки из формы последовательного ПИД-регулятора в стандартную форму (иногда называемую идеальной или неинтерактивной) представлено в последнем разделе.
Эти уравнения действительны для серийной (иногда называемой классической, интерактивной) формы реализации PID. Обратите внимание, что коэффициент усиления ПИД-регулятора и время интегрирования изменяются при изменении лямбда. Время производной остается одинаковым для всех вариантов лямбда. Преобразование настройки из формы последовательного ПИД-регулятора в стандартную форму (иногда называемую идеальной или неинтерактивной) представлено в последнем разделе. 9 показан пошаговый тест регулятора уровня LIC-102 для определения динамики процесса. Были проанализированы несколько таких шагов и рассчитана средняя динамика процесса. Прирост процесса составляет 0,005% PV/секунду/%OUT; мертвое время составляет 20 секунд; постоянная времени запаздывания первого порядка составляет 60 секунд.
9 показан пошаговый тест регулятора уровня LIC-102 для определения динамики процесса. Были проанализированы несколько таких шагов и рассчитана средняя динамика процесса. Прирост процесса составляет 0,005% PV/секунду/%OUT; мертвое время составляет 20 секунд; постоянная времени запаздывания первого порядка составляет 60 секунд.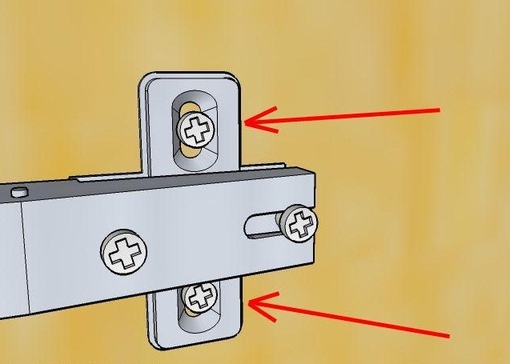
 10 показана реакция на ступенчатую уставку и ступенчатое изменение нагрузки для каждого значения лямбда в таблице. Обратите внимание, что настройка стабильна для гораздо более коротких значений лямбда, чем начальная точка 3 × (больше мертвого времени или постоянной времени). Однако это при постоянной динамике процесса в симуляторе. Дополнительные тесты реального процесса в различных рабочих условиях помогут определить, насколько постоянна динамика процесса.
10 показана реакция на ступенчатую уставку и ступенчатое изменение нагрузки для каждого значения лямбда в таблице. Обратите внимание, что настройка стабильна для гораздо более коротких значений лямбда, чем начальная точка 3 × (больше мертвого времени или постоянной времени). Однако это при постоянной динамике процесса в симуляторе. Дополнительные тесты реального процесса в различных рабочих условиях помогут определить, насколько постоянна динамика процесса. Оптимизация производительности процесса может потребовать, чтобы контуры в установке имели скоординированный отклик, очень медленный отклик для использования мощности процесса для компенсации изменчивости или очень быстрый отклик для максимального регулирования возмущений нагрузки. Метод настройки лямбда обеспечивает возможность настройки ПИД-регуляторов в технологической системе для достижения целевых показателей производительности процесса независимо от требований контура. Метод лямбда-настройки можно использовать для всех общих сложных динамических процессов, перечисленных во введении.
Оптимизация производительности процесса может потребовать, чтобы контуры в установке имели скоординированный отклик, очень медленный отклик для использования мощности процесса для компенсации изменчивости или очень быстрый отклик для максимального регулирования возмущений нагрузки. Метод настройки лямбда обеспечивает возможность настройки ПИД-регуляторов в технологической системе для достижения целевых показателей производительности процесса независимо от требований контура. Метод лямбда-настройки можно использовать для всех общих сложных динамических процессов, перечисленных во введении. Агрессивная настройка лямбда = мертвое время = 20 секунд приводит к 82-процентному усилению любой изменчивости с периодом около 138 секунд. Другими словами, если существует изменчивость с периодом около 138 секунд при ручном управлении контроллером, перевод контроллера в автоматический режим увеличит изменчивость на 82 процента! Интересно, что предельный цикл плохо работающего регулирующего клапана может иметь период около этого значения! На рис. 12 показано представление данных во временном ряду, иллюстрирующее эту концепцию. На рисунке 13 показано, как агрессивность настройки влияет на коэффициент усиления. В процессе настройки контроллера следует учитывать концепцию усиления резонанса и вариативности.
Агрессивная настройка лямбда = мертвое время = 20 секунд приводит к 82-процентному усилению любой изменчивости с периодом около 138 секунд. Другими словами, если существует изменчивость с периодом около 138 секунд при ручном управлении контроллером, перевод контроллера в автоматический режим увеличит изменчивость на 82 процента! Интересно, что предельный цикл плохо работающего регулирующего клапана может иметь период около этого значения! На рис. 12 показано представление данных во временном ряду, иллюстрирующее эту концепцию. На рисунке 13 показано, как агрессивность настройки влияет на коэффициент усиления. В процессе настройки контроллера следует учитывать концепцию усиления резонанса и вариативности.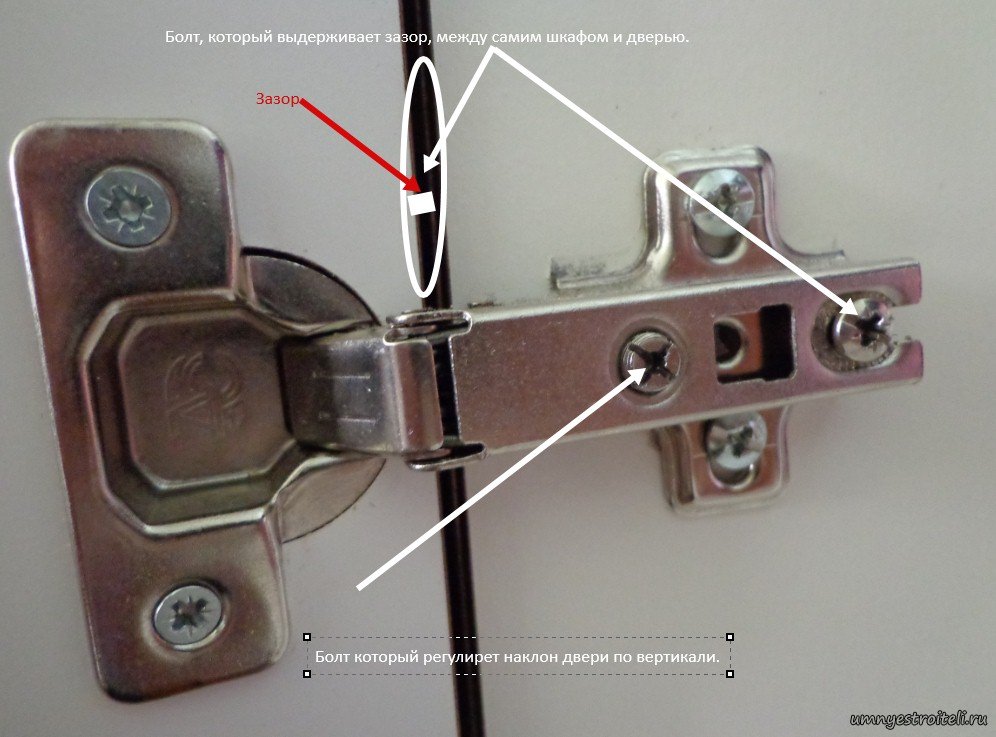 Уравнения основаны на параметрах настройки последовательного ПИД-регулятора со следующими единицами измерения.
Уравнения основаны на параметрах настройки последовательного ПИД-регулятора со следующими единицами измерения.